3.駆動方法
多軸マニピュレータ開発プレゼンRevB-011.jpg)
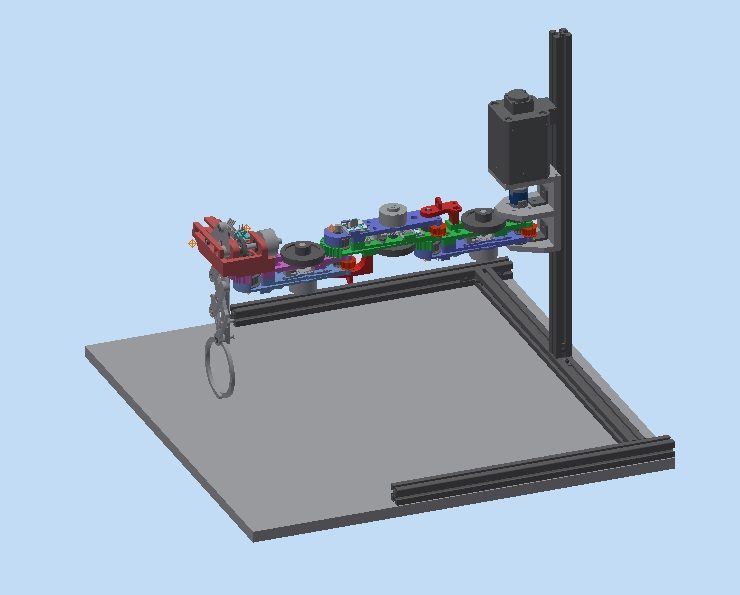
第一関節の根元にあるモーターからの回転動力は、根元側スプロケット(現在はプーリー)、チェーン(タイミングベルト)、先端側スプロケット(現在はプーリー)を介し、差動歯車機構の太陽歯車へ伝わります。太陽歯車の回転は、遊星歯車、内歯車へと伝わり、再び後続するリンクの根元側スプロケット(現在はプーリー)に動力を伝えます。
遊星歯車のキャリアとリンクは一体形状で、リンクの外側には、太陽歯車軸を中心とした歯車の歯溝形状をしています。この歯溝形状と噛み合う恰好で、クラッチに繋がれた、歯車と噛み合います(クラッチ機構)。
多軸マニピュレータ開発プレゼンRevB-012.jpg)
クラッチ機構は、回転動力を後続のリンクへ伝えるかOn,Offを切り替えるために用いられます。Onをクラッチ解放とし、Offをクラッチの拘束とすると、回転させたい関節のリンクのクラッチをOnにし、それ以外のクラッチをoffにすると、Onにしたクラッチ以降のリンクに回転動力を伝えることが出来なくなり、遊星キャリア(リンク)を回転させることになります。この仕組みによって、指定した関節を回転させることが出来ます。
強み:
1)重量物のモーターを根元(ロボット支持台)にのみ搭載するため、リンク全体がかるくなり、根元側のリンクや、シャフトの曲げ応力を小さくすることが出来る。
2)クラッチの拘束力/重量 vs モーターのトルク/重量では、クラッチの方が、値が大きい。同等のモーターで駆動した場合よりも軽くて、高トルクを伝達できる。また、クラッチは、Onの時だけ電力を消費し、また、Onを維持するためには電力はほとんどかからない。
弱み:
1)1関節毎動かすため、駆動が遅い。先端に行くほど減速されているため、多関節になるほど、先端の駆動が遅くなる。
2)摩擦損失は、先端に行くほど蓄積されるため、モーターの仕様上の最大リンク数がある。
詳細:多軸マニピュレータ 特開2017-177233
https://www7.j-platpat.inpit.go.jp/tjk/tokujitsu/tjkt/TJKT_GM301_Detailed.action
4. 遊星歯車ベルト機構
遊星歯車ベルト機構は、遊星歯車とタイミングベルトをかみ合わせて駆動させる機構です。
通常の遊星歯車機構は、1つの太陽歯車と、3つ以上の遊星歯車、そして1つの内歯車から構成されています。
特願2018-36947
これをタイミングベルトとつなげると、伝達の順序は以下の構成になります。
太陽歯車⇔遊星歯車⇔内歯車⇔プーリー⇔タイミングベルト
注記:"⇔"は双方向伝達をしめす。
そして、それぞれの部品構成の意味に注目すると、内歯車⇔プーリー間は、歯車の歯溝形状の変換を行っていることがわかります。
もし、遊星歯車と、タイミングベルトがかみ合うことが出来れば、内歯車、プーリー、遊星歯車1つ以上を削減でき、伝達にかかわる動力損失を大幅に削減できます。

(歯先円直径のピッチとタイミングベルトのピッチを合わせた歯車)
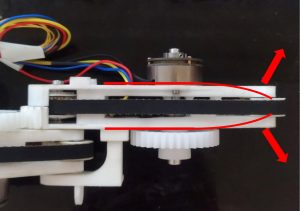
タイミングベルトと遊星歯車の歯がかみ合うには、ピッチを合わせる必要があります。そのためには、タイミングベルトのピッチと歯車の歯先直径基準のピッチを合わせる必要があります。歯溝形状を歯車と噛み合う形状を維持したまま、タイミングベルトのピッチを合わせることが出来る歯車は、ピッチごとに1つ存在し、タイミングベルトと歯車の両方をかみ合わせることが可能です。しかしながら、タイミングベルトの歯溝形状は、歯車に合わせた形状をしておらず、互いの歯と歯の間に隙間が出来たり、歯車の歯幅が広すぎでタイミングベルトの歯溝にはまらないことが起こります。上記写真の様に、小さいピッチであれば、隙間も小さく、機器の仕様によっては使用可能な場合があります。しかしながら、そのほかの場合、歯車の歯形状を変更しなければ、バックラッシュが大きくなり、使いにくいものになります。そこで、弊社は、この問題を解決する歯溝形状を開発しました。(現在、特許出願中、公開後に詳細を説明します。)
上記動画の様にスムーズに動き、バックラッシュもほとんどなく、動力損失も減らすことが確認できています。
本ロボットの様に、遊星歯車機構(減速機)とタイミングベルトを組み合わせる機器のとして、自動車の駆動系や、風力発電のギア、自転車のトランスミッションなどに導入できれば、低燃費に貢献できると考えています。
現在は、強度や、量産製造を検討している段階です。
5.テンショナー機構
通常、タイミングベルトは、張りを持たせるため、テンショナーが必要です。このリンクは樹脂材の3dプリントで製作しているため、比較的弱い力で撓ませることが出来ます。ざっくり断面2次モーメントを求めて撓み量を出し、あとは、0.1~0.2[mm]単位で調整し、テンショナーが無くてもタイミングベルトに張りを持たせることが出来るようになりました。